Vertebrate Locomotion
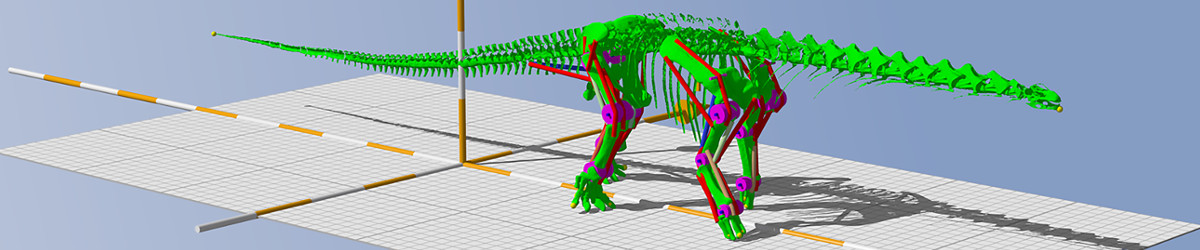
It is now possible to produce highly detailed musculoskeletal models that can be used to study the locomotor style and abilities of both extant and extinct animals. The successful construction, testing and validation of the computational models using extant species indicates that it is possible to generate robust models applicable to extinct species, such as dinosaurs.
The Group are interested in the use of numerical techniques for investigating comparative anatomy, fossil behaviour and biomechanics. The team working in this field have a background in human and comparative functional anatomy, and scientific industrial experience in image analysis and computer modelling.
Everyone knows that dinosaurs come in all shapes and sizes. Most don't look like anything that's alive today and some are just plain bizarre. One group that fit this description well are the duck-billed dinosaurs (a.k.a. hadrosaurs). Along with the strange appearance (the eponymous duck-bill, peculiar skull ornaments, and long, slender forelimbs) scientists have argued about how they might have moved: Did they walk on four limbs, two limbs, or a combination of both depending on the speed? It has even been suggested that some may have hopped like a kangaroo!
In a paper published in Palaeontologica Electronica, scientists at Manchester, Oregon and Yale have been testing these ideas. But how do you test the range of possible types of locomotion that an animal might have done? Previously the team has used computer simulation to calculate the top running speed of a range of two-legged dinosaurs. It turns out that looking at all the possible locomotor options in a single four-legged dinosaur is actually much trickier. Much like dressage trained horses the basic body shape is capable of using a whole range of possible gaits even though it is likely that it would much prefer some over others.
Fortunately for the research team the UK Research Council's new supercomputer Hector had just come online and could provide sufficient computational power for the job. This machine is over 10 times faster than the computers used previously by the team and allowed the computer simulation a completely free rein to come up with whatever form of locomotion it could. And indeed from a completely random set of starting conditions the model generated a full range of possible gaits: bipedal running and hopping as well as quadrupedal trotting, pacing and galloping.
The big surprise was that hopping gait came out as fastest at 17 m/s, followed by quadrupedal galloping (16 m/s), and bipedal running (14 m/s). However the team also looked at how these different ways of moving would apply forces to the skeleton. Here hopping came out the worst: if the hadrosaur had moved like that it would have destroyed its own skeleton. In the end bipedal running came out as probably the best compromise between performance and skeletal loading. But the really clear message is that there is still more research to be done particularly looking at how large and fast animals can move within the margins of safety required by their skeletons.